
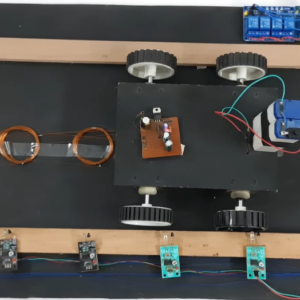
Self Balancing Robot
₹8,250.00
This project presents the design, development, and implementation of a self-balancing robot using Arduino and an accelerometer sensor.
DIY VIDEO : https://www.youtube.com/watch?v=wvNemUdpu5o
- Description
- Customizations
- Reviews (0)
Description
DESCRIPTION
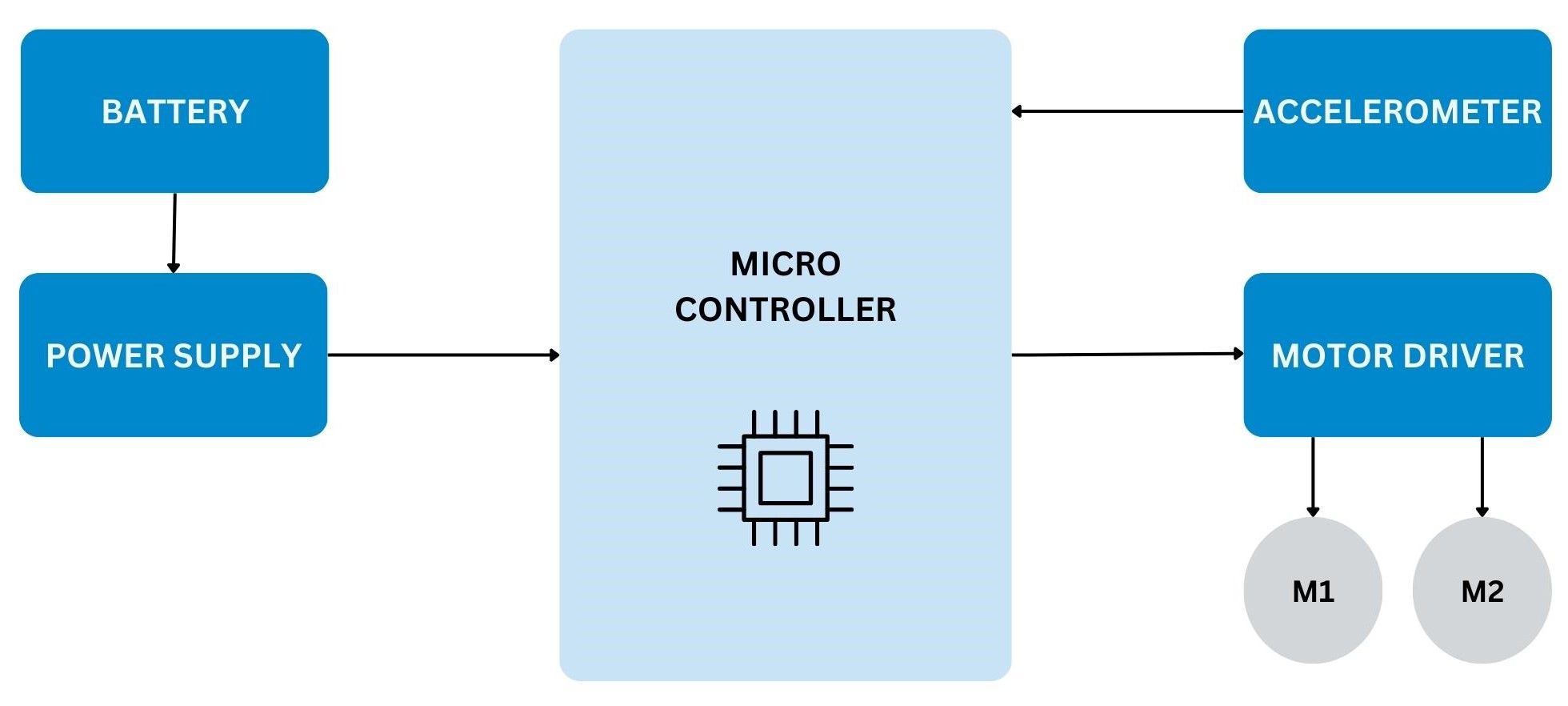
The primary objective of this project is to create a compact and cost-effective self-balancing robot that can maintain its equilibrium while navigating on various terrains. The robot’s control system relies on real-time feedback from an accelerometer, which measures the robot’s tilt angle with respect to the horizontal plane.
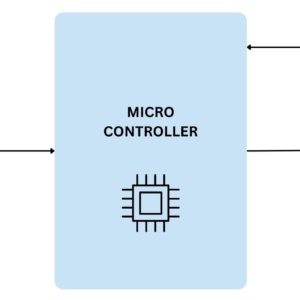
BLOCK DIAGRAM
HARDWARE COMMPONENTS
- ARDUINO (MICROCONTROLLER)
- BATTERY
- VOLTAGE REGULATOR CIRCUIT
- MOTOR DRIVER
- DC MOTOR (X2)
- ACCELEROMETER
- WHEELS
- JUMPER WIRES
- L-CLAMP
SOFTWARE
- ARDUINO IDE
- EMBEDDED C
- C PROGRAMMMING
🔧 Project Customizations (For Students)
Students can enhance or modify this project based on college syllabus, guide instructions, or personal interest.
Customizations help improve innovation, marks, and practical understanding.
Available Customization Options:
-
🌐 IoT/ AI/ ML Integration ( ThingSpeak, Blynk, Firebase, Web Dashboard etc. )
-
☀️ Solar Power Integration
-
🤖 Machine Learning / AI Modules
-
📡 GPS & GSM Based Tracking / Alerts
-
📟 Additional Sensors (as per application)
-
📲 Mobile App / Web Monitoring
-
📊 Advanced Data Logging & Graphs
-
⚙️ Hardware & Software Feature Modifications
-
🎯 Customization as per College or Guide Requirement
If you need any additional feature or modification,
📞 Contact us on WhatsApp and share your requirement.

Early Project Booking Recommended
Early Project Booking – Strongly Recommended
Students are advised to book their final year or semester project early, even with just a title or brief idea. Early booking helps us reserve your preferred topic, start documentation, diagrams, code planning, and component preparation in advance, and provide timely academic guidance.
You will receive complete documentation (abstract, report, block diagram, circuit, code explanation) well before submission. The working hardware kit will be delivered as per your college schedule. PPTs for reviews, viva, or seminars will be prepared on request.
Book early → Stay stress-free → Focus on learning.
Contact us with just the project title—we’ll handle the rest.















Reviews
There are no reviews yet.